简要
利用IPS4.0 软件处理小画幅相机数据,在低精度POS数据下,快速、准确生成匹配点、采用光束法区域网平差法进行空三平差、快速生成DTM、单片正射纠正和自动镶嵌线生成、自动匀色、自动镶嵌、分幅成图等工艺说明。
项目说明
当前采用无人机获取航空影像数据方式应用项目越来越多,航拍的影像片子数量也越来越多,高效、准确、灵活的处理无人机数据软件也随之诞生。但都需要面对和解决无人机数据在处理过程中的独特问题:
1、相机画幅小,拍摄航片数量多、数据量大
2、飞行姿态不稳定、POS数据精度不高、航摄基高比变化明显。
3、采用非量测相机,相片数据镜头畸变严重。
4、弱纹理(水域、森林)区域大,相片匹配点难生成。
5、用户对DOM成图要求时间紧迫,需要最短时间成图。
本项目以云南测区为实例,结合IPS 4.0软件,快速生成0.25米DOM进行详细说明。
数据资料由珠江水利委员会中水珠江勘测设计院有限公司提供。
航拍数据
相机:Cannon 5D MarkII 2100万像素,CCD 36mm*24mm
像素大小:6.41u 采用24mm广角镜头 光圈5.6
航飞:共2架次;14条航线;航高800米; 航拍基线约140m;航距约600m;
10月7日拍摄 270张和10月9日拍摄776张
相片:原始数据总共15.6G , 1046张 11.6M- 18.2M/张;
POS数据:两次架次pos数据有遗漏、有重复、且记录顺序有误,属于低精度资料。
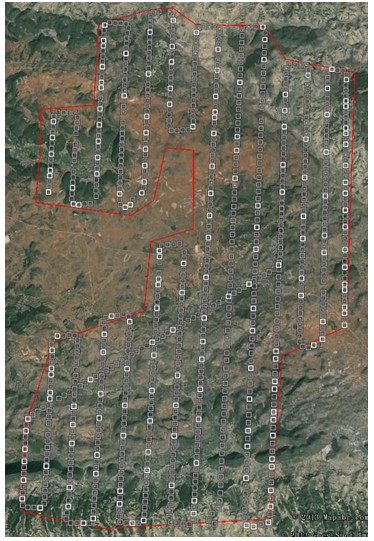
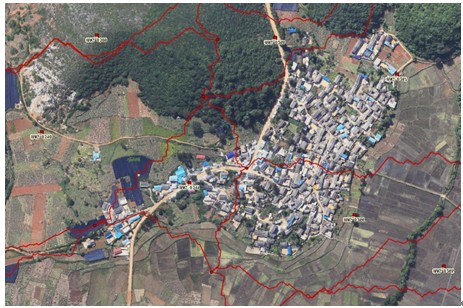
测区情况
测区大约70Km2; 测区有河流自南向北贯穿整个测区,山地、丘陵占大约90%区域。测区内最高点海拔1650m , 最低点海拔1350m; 测区南北方向约12Km;东西方向8Km;去掉飞机掉头、拐弯、两架次重复飞行的数据,总共551张片子覆盖测区。有效面积60Km2;
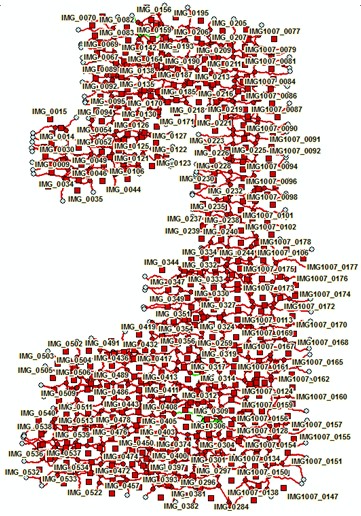
自动匹配点
1. 像主点构网
确定相片空间位置和预计匹配关系
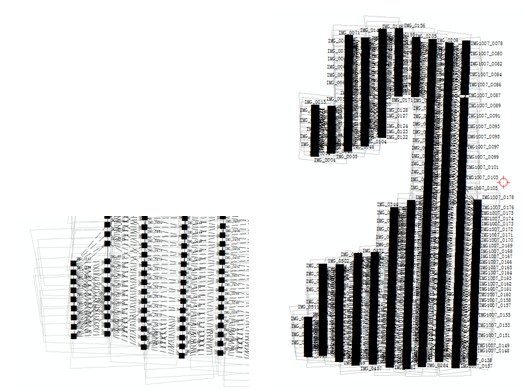
2. 运行MetchMe 程序,自动匹配连接点
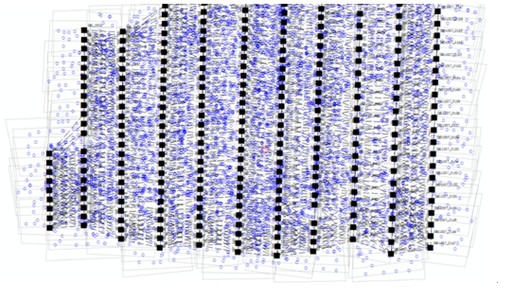
匹配点分布在区域网内
黑线表示相片之间的连接关系,线越黑越粗,表示连接强度越大

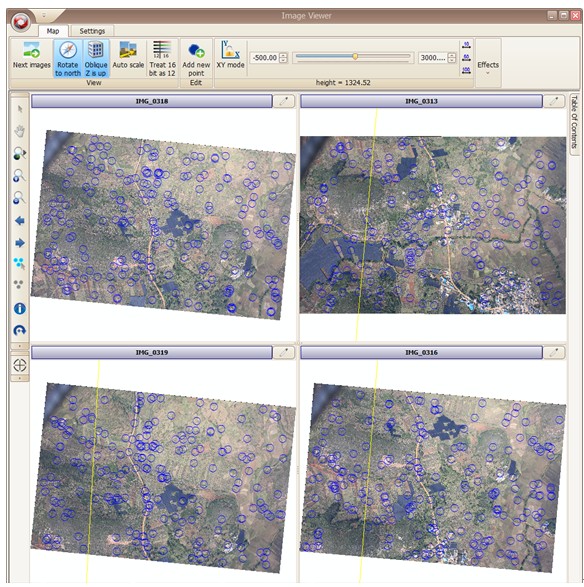
上图为匹配点在相片中的分布
匹配点统计:
551张相片,总共匹配12159个匹配点;12069个合格匹配点;
匹配点花费时间:28分15秒
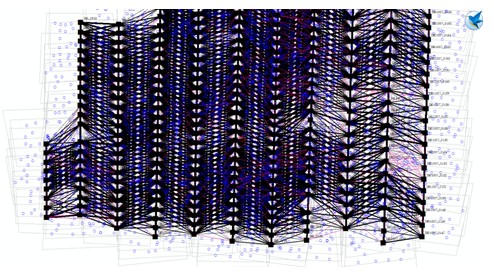
自由网空三平差
完全利用POS数据中三个线元素X、Y、Z坐标值,采用光纤束法区域网平差;像素RMS:1.73
像素RMS最小0.001
像素RMS最大11.920
该结果还可以优化,直到RMS小于0.67
空三平差花费时间:5分钟

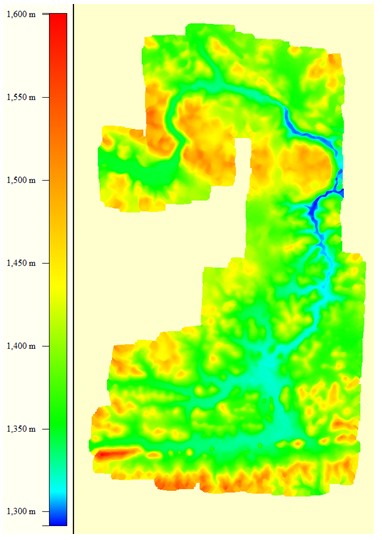
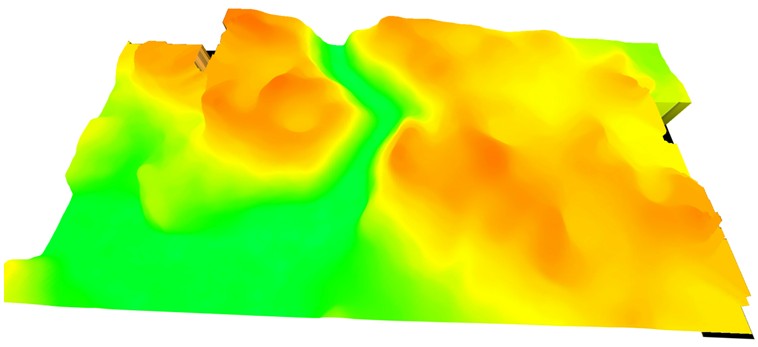
DTM数据生成
定义生成2.5m格网DTM数据。
DTM数据格式:Tiff 格式。GSD格网2.5m
DTM生成花费时间:1分25秒。

单片正射纠正
利用生成的DTM进行正射纠正单片数据,单片DOM分辨率0.25m
551张DOM数据正射纠正花费时间:7分12秒

正射纠正前原始数据
正射纠正后单片DOM数据
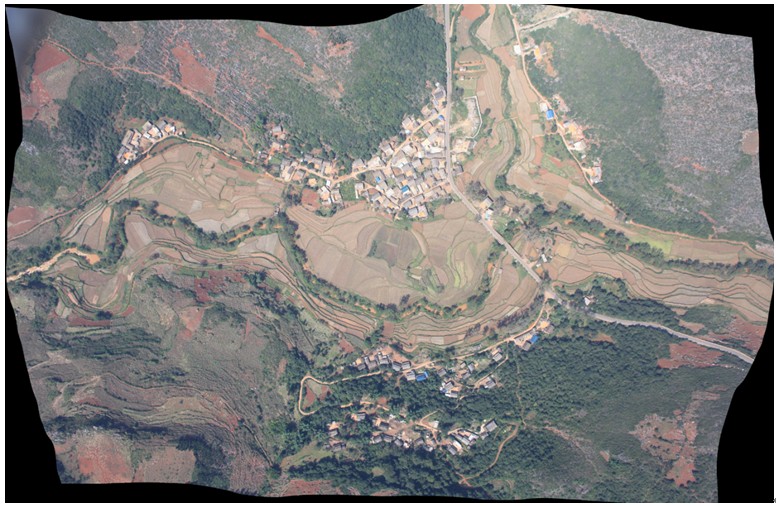
整图正射镶嵌
将所有单片正射成果,先进行匀色、色彩平衡、正射区域裁切、自动镶嵌线生成、羽化、并按照图幅大小裁切成图。
镶嵌线自动生成,并且可编辑,以shp文件方式保存
局部镶嵌线
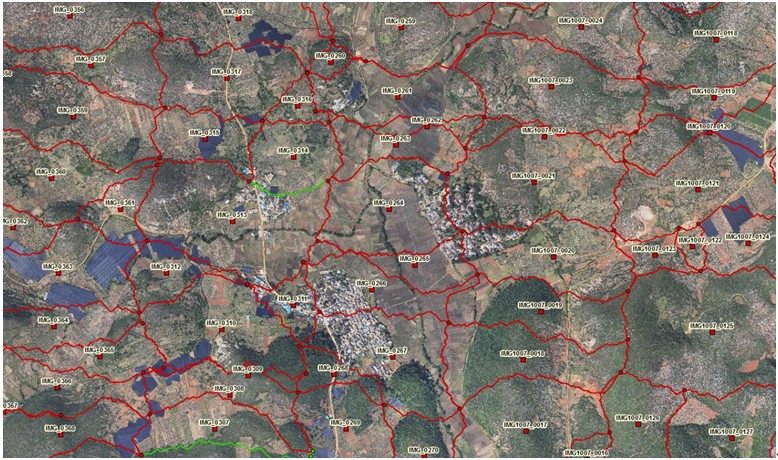
镶嵌线将躲避房屋、并进行镶嵌线周边自动像素羽化,色彩均匀、无明显色彩突变
整图正射镶嵌花费时间统计:1小时12分
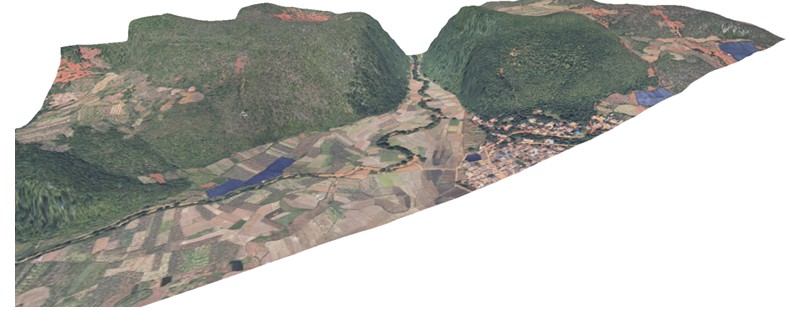
三维场景显示

时间统计
| 流程 | 镜头畸变校正 | 自动匹配点 | 空三平差 | DTM生成 | 单片正射 | 正射镶嵌 |
| 时间 | 23分钟 | 28分15秒 | 5分钟 | 1分25秒 | 7分12秒 | 1小时12分 |

有关硬件
硬件采用Dell 移动工作站M6700,具体配置:Core(TM)i7-3840QM CPU @2.8GHz ; 8核 64位 Win7专业版,内存32G(实际仅用3-4G),显卡英伟达 Quadro K4000M ;硬盘1T 5400转速。
原始相片分辨率0.21m,单片正射处理重采样为0.25m,全部正射镶嵌也是0.25m输出;DEM为2.5m。
声明:本文摘自3sNews
(西安中策资讯科技有限责任公司 网址:http://www.zcgis.com)
